~略~
/* Includes ------------------------------------------------------------------*/#include "main.h"#include "stdio.h"// ヘッダの追加#include "string.h"// ヘッダの追加
~略~
intmain(){
/* USER CODE BEGIN 1 */char buff[256];
setbuf(stdout, NULL);
strncpy(buff, "Hello World", 12);
/* USER CODE END 1 */
~略~
/* Infinite loop *//* USER CODE BEGIN WHILE */while (1)
{
/* USER CODE END WHILE */printf("%s", buff);
HAL_Delay(1000);
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
~略~
/* USER CODE BEGIN 4 */int_write(int file, char *ptr, int len)
{
HAL_UART_Transmit(&huart2,(uint8_t *)ptr, len, 10);
return len;
}
/* USER CODE END 4 */
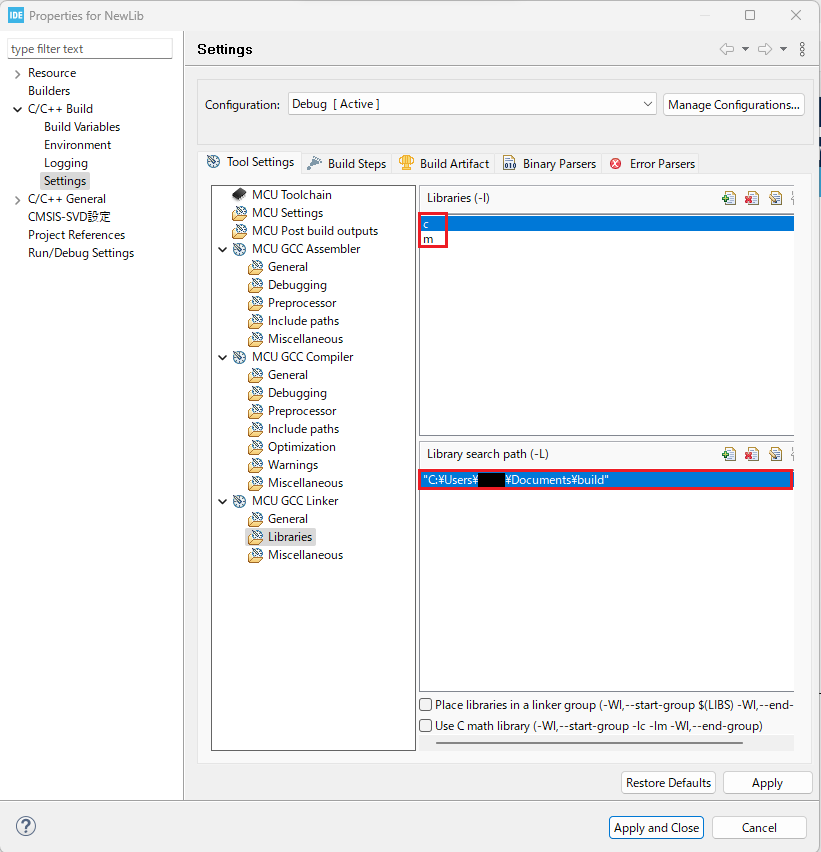
attempt to open C:\Users\XXX\Documents\build\libc.a succeeded
C:\Users\XXX\Documents\build\libc.a
(C:\Users\XXX\Documents\build\libc.a)libc_a-printf.o
(C:\Users\XXX\Documents\build\libc.a)libc_a-puts.o
(C:\Users\XXX\Documents\build\libc.a)libc_a-findfp.o
~略~
attempt to open c:/st/stm32cubeide_1.10.1/stm32cubeide/plugins/com.st.stm32cube.ide.mcu.externaltools.gnu-tools-for-stm32.10.3-2021.10.win32_1.0.0.202111181127/tools/bin/../lib/gcc/arm-none-eabi/10.3.1/thumb/v6-m/nofp\libgcc.a succeeded
c:/st/stm32cubeide_1.10.1/stm32cubeide/plugins/com.st.stm32cube.ide.mcu.externaltools.gnu-tools-for-stm32.10.3-2021.10.win32_1.0.0.202111181127/tools/bin/../lib/gcc/arm-none-eabi/10.3.1/thumb/v6-m/nofp\libgcc.a
(c:/st/stm32cubeide_1.10.1/stm32cubeide/plugins/com.st.stm32cube.ide.mcu.externaltools.gnu-tools-for-stm32.10.3-2021.10.win32_1.0.0.202111181127/tools/bin/../lib/gcc/arm-none-eabi/10.3.1/thumb/v6-m/nofp\libgcc.a)_udivsi3.o
(c:/st/stm32cubeide_1.10.1/stm32cubeide/plugins/com.st.stm32cube.ide.mcu.externaltools.gnu-tools-for-stm32.10.3-2021.10.win32_1.0.0.202111181127/tools/bin/../lib/gcc/arm-none-eabi/10.3.1/thumb/v6-m/nofp\libgcc.a)_divsi3.o
(c:/st/stm32cubeide_1.10.1/stm32cubeide/plugins/com.st.stm32cube.ide.mcu.externaltools.gnu-tools-for-stm32.10.3-2021.10.win32_1.0.0.202111181127/tools/bin/../lib/gcc/arm-none-eabi/10.3.1/thumb/v6-m/nofp\libgcc.a)_dvmd_tls.o